





こんにちは。かいちょうです。
先週に続いてチューニングを行います。
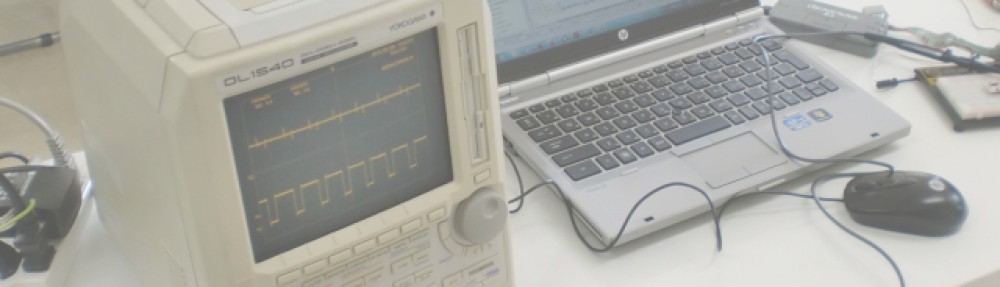
今手元にオシロスコープがない状態なので、何が起きているかを予想を立てて少しトライアンドエラー的に対策と効果を確認してみます。
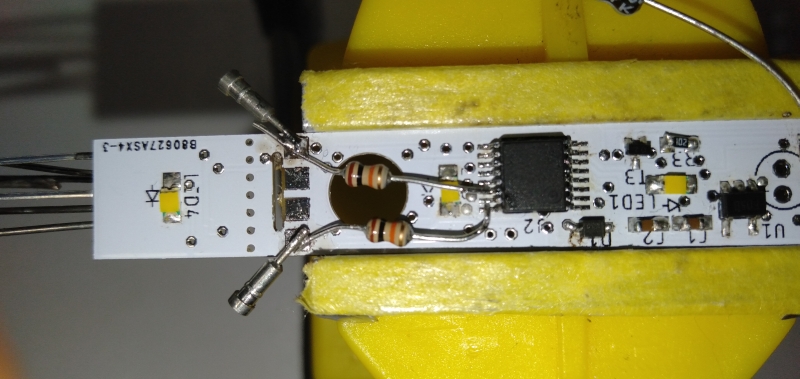 まず最初に試したのは線路電圧を両線からの差分で測定する方法。作成した基板は、搭載されているマイコンRL78/G11のI/O端子から、片側線路のみ読み取る設計だったので、ちょっと強引ですがリード付き抵抗を使って両線をマイコンの空き端子にブリッジします。
まず最初に試したのは線路電圧を両線からの差分で測定する方法。作成した基板は、搭載されているマイコンRL78/G11のI/O端子から、片側線路のみ読み取る設計だったので、ちょっと強引ですがリード付き抵抗を使って両線をマイコンの空き端子にブリッジします。
プログラムも修正して両線の状態をマイコンから監視するようにします。しかし、多少安定したかなっと思う程度で実用域には程遠い感じでした。
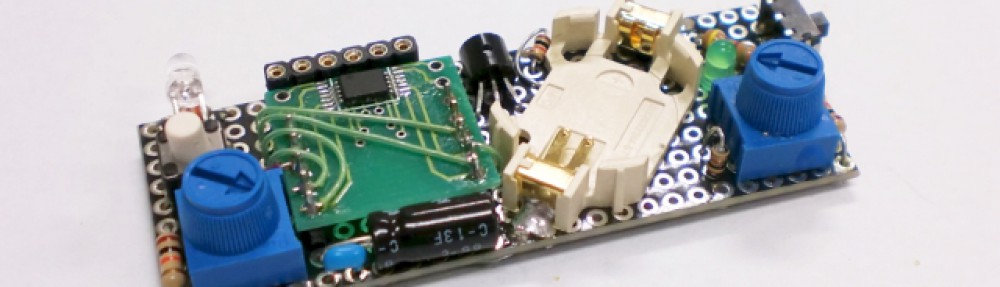
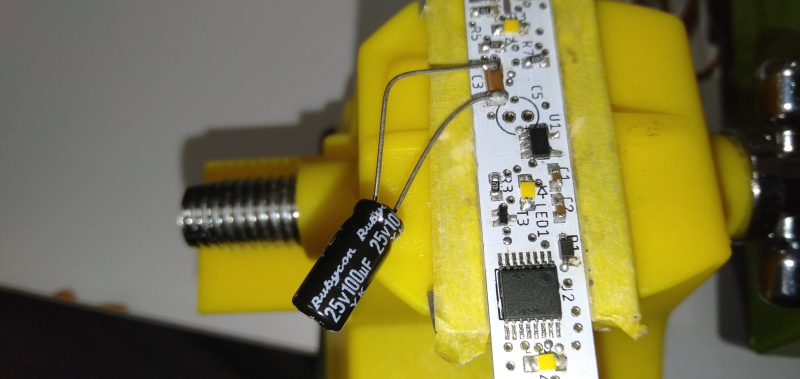 続いて実施したのは、デコーダのMCU電源を安定化させるために容量追加です。取り急ぎ適当な100uFを付けてみました。
続いて実施したのは、デコーダのMCU電源を安定化させるために容量追加です。取り急ぎ適当な100uFを付けてみました。
これは効果があったので、線路離線に伴うマイコン電源のふらつきが多少影響を与えている事がわかりました。が、これをそのまま採用するにはコンデンササイズが、車両搭載にはデカすぎますし、完全に誤判定がなくなったわけではなく不完全です。
やはりハード的な対策というよりソフト的な対策の方がよさそうです。
そこで、アナログモード時の判定アルゴリズムを変更。詳細は割愛しますが、これまでの単位時間での判定から、フィルタ処理を入れた上で判定する方法に変更をしてみました。
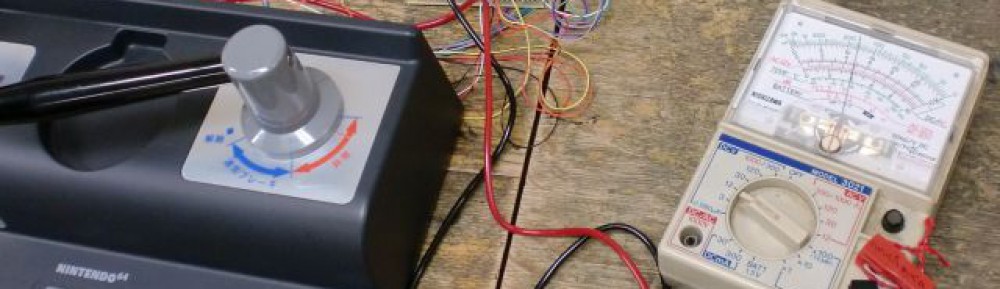
この変更で、ノイズがすごい、旧式のTOMIX 5001コントローラでもある程度まともな運転ができるようになりました。
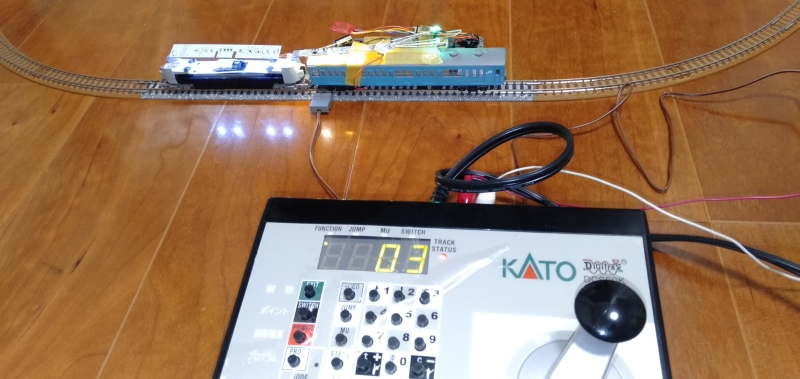
改めて、DCCモードも含めて確認実験をしてみました。
こちらも新しいプログラムで問題なく動いているようです。(牽引というか、押しているのはHiSEの電動車)
この後、100uFを撤去しましたがそれでも大丈夫そうでした。
このようにプログラムをチューニングすることである程度なんとかなるケースだと助かります。
が、毎回プログラムを書き換える度にデコーダを車体から外すのは面倒なので、そろそろ線路からのファームウェアアップデートを考えなければと思っているところです。(技術的にはできるのですが、コマンドステーション側の環境構築とデコーダのソフト変更が面倒で二の足を踏んでました)
あとでオシロスコープが使えるようになったら、線路波形も測定してお見せしたいと思います。
今日はこの辺で。
(K)