こんにちは。会長です。
今日は先日の鉄道ガチャガチャネタをさらに進めたお話をしたいと思います。
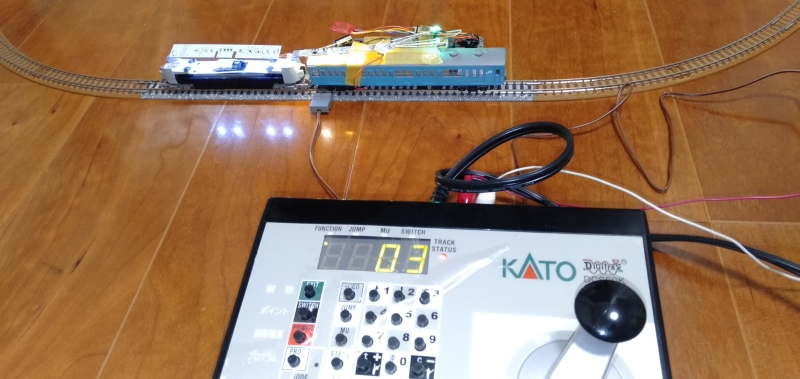
運転台コレクションがNゲージのコントローラになったらいいな・・・と前回書いたのですが、その思いに火がついてしまいました。(笑)
なんとか実現しようと考え始めてしまいました。
実現する上で追加が必要なコンポーネントとしては、主にモータドライバ、全体制御をするマイコン、としてハンドル角を検出するためのセンサがあります。前2つはこれまでのDCC開発で培ってきた資産があるのであまり難しくありません。問題は最後のセンサです。
鉄道模型を自在に制御するのであれば、ハンドル角に応じた速度制御を行いたいのですが、鉄道運転台コレクションは一杯に倒したときに音が鳴ればいいや・・・という仕様なので角度検出ができるような機構がありません。
これをどうアイデアで実現するか、実験も行ってみたので報告したいと思います。
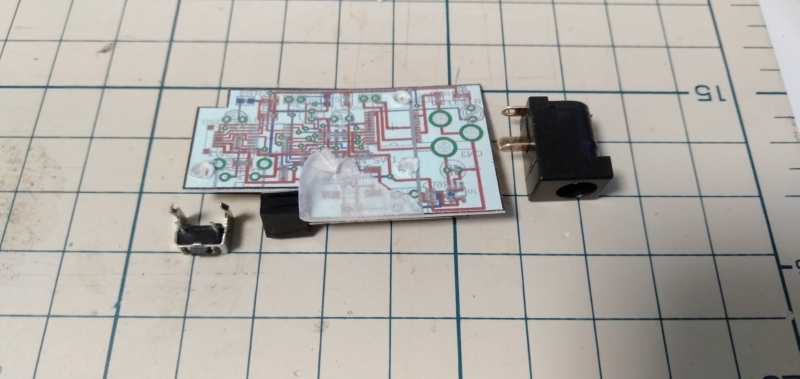
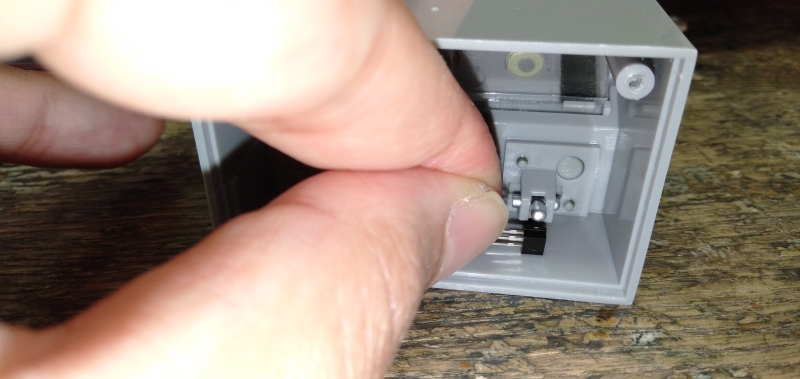
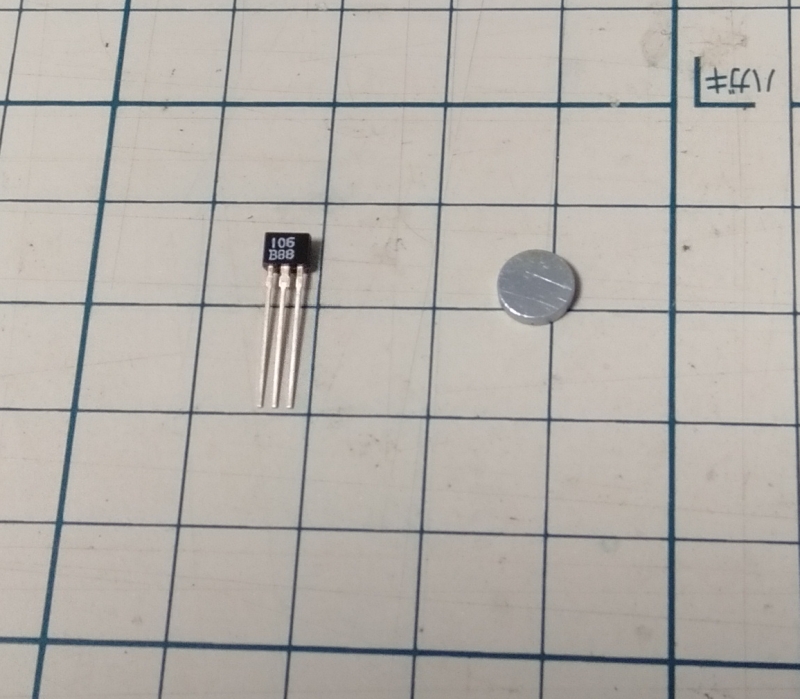
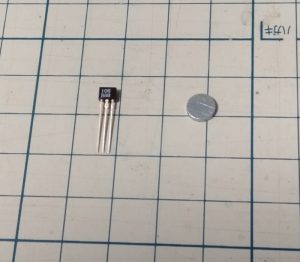
選んだのは秋月で売っているソニー製ホール素子DM-106Bです。一つ50円なり。

このセンサはTO-92のような形をした小型品で、内容積が小さい今回の運転台にぴったりです。さらに、センサの出力がアナログタイプなので、無段階の出力が得られるという期待もあります。
(ホール素子で多いのはどちらかというとヒステリシス付のデジタル出力で今回の用途には合わないと思いました)
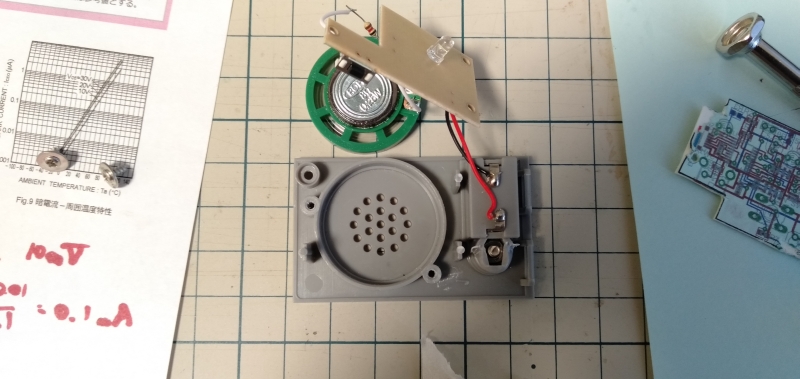
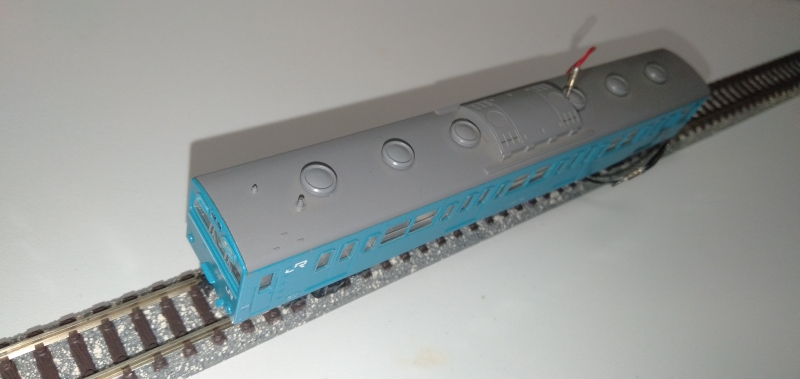
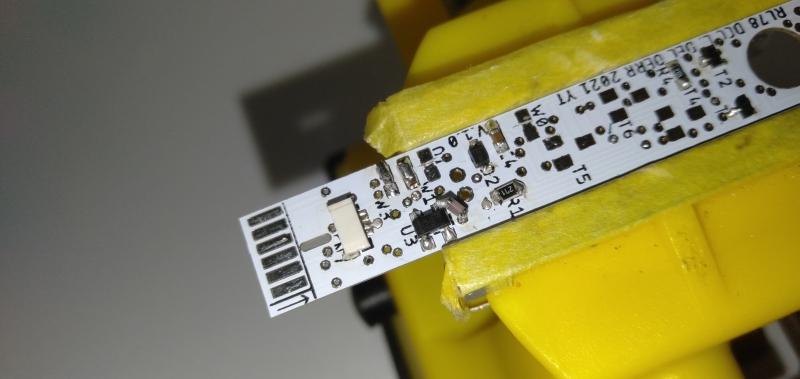
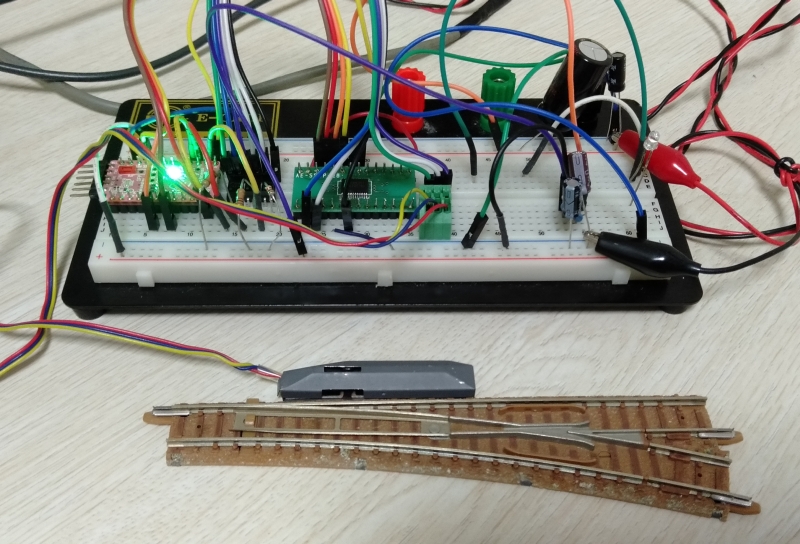
 センサと本体を並べてみます。中の基板は乗っ取りで変更する予定なのでセンサを取り付ける部分がないのは問題になりません。
センサと本体を並べてみます。中の基板は乗っ取りで変更する予定なのでセンサを取り付ける部分がないのは問題になりません。
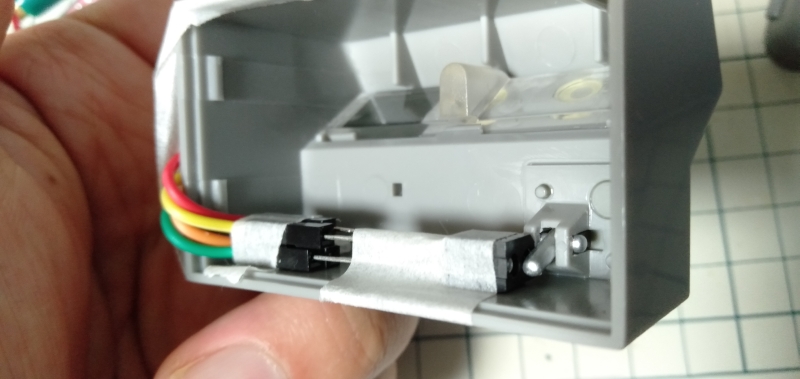
 実際にリミットスイッチの近傍においてみました。小型なので入りそうに見えます。リミットスイッチの頭とほぼ同じサイズです。
実際にリミットスイッチの近傍においてみました。小型なので入りそうに見えます。リミットスイッチの頭とほぼ同じサイズです。
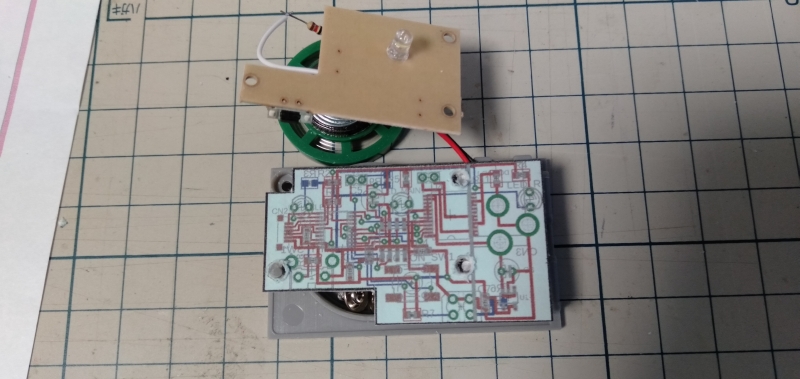
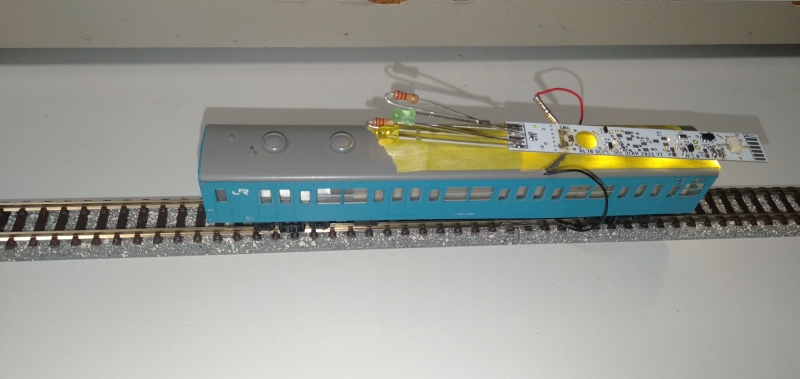
 ハンドル側との位置合わせもしてみます。ハンドルの下部に小さな磁石を付けて、その反応をセンサで取ろうというという発想です。
ハンドル側との位置合わせもしてみます。ハンドルの下部に小さな磁石を付けて、その反応をセンサで取ろうというという発想です。
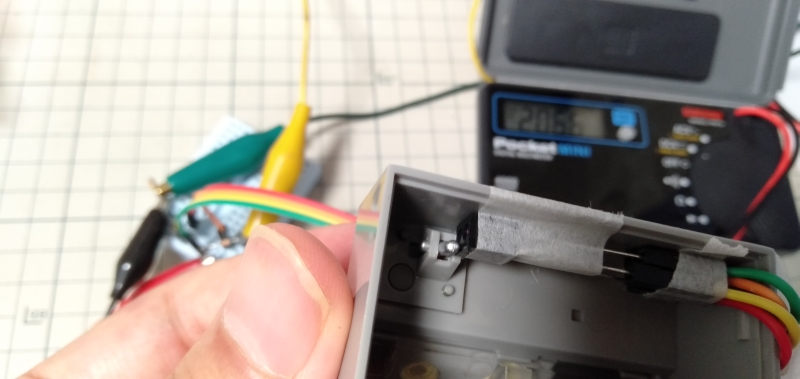
 早速、手持ちの磁石で出力がどの程度変化するかを確認してみます。この磁石は台所の換気扇フィルタ固定用で、鉄板から指ではずそうとすると難儀するほど強力です。
早速、手持ちの磁石で出力がどの程度変化するかを確認してみます。この磁石は台所の換気扇フィルタ固定用で、鉄板から指ではずそうとすると難儀するほど強力です。
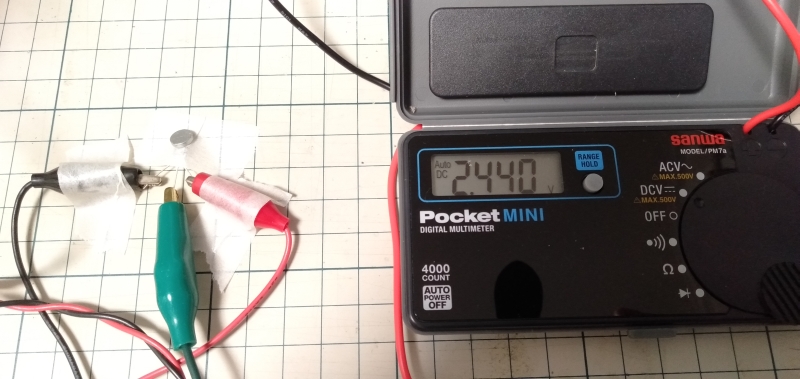
センサの出力は上側と下側に磁気によって変化する抵抗があり、磁気がない場合は入力された電圧のちょうど半分が出る仕様になっています。そこで、5Vの電源を掛けて、磁石が当たったときにどのくらいその電圧が変化するかをテスタで確認することにしました。

こちらは、磁石を当てていない時の電圧です。スペックでは入力電圧の半分ですが、ほぼほぼぴったり2.499Vが出ています。これに磁石を当てると

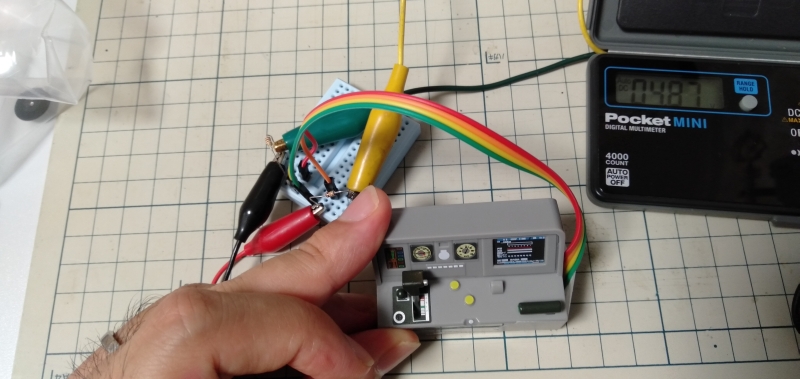
確かに0.009V下がりました。しかし、これではあまりにも変化量が少ないです。
実際、ハンドルの下部に付けたとすると物理的には数mmの変化になるわけですが、数mmの変化だともっともっと電圧の変化量が小さいわけで・・・OPampで増幅しないとダイナミックレンジが確保できそうにありません。
それに、何度も動かしていると、同じように磁石の位置を変化させても不安定な出力(同じ値にならない)です。これはダメかも。
そもそもこのホール素子のアプリケーションは回転検出のようなものだったので、絶対的な磁力をDC的に計測するのには向いておらず、AC的に変化するようなものでないとダメなのかもしれません。(そう考えるとデジタル出力が多いというのも納得です)
というわけで、最初のホール素子は失敗になってしまったのですが、めげずに次なるアイデアを考えていきたいと思います。
今日はこの辺で
(K)








")




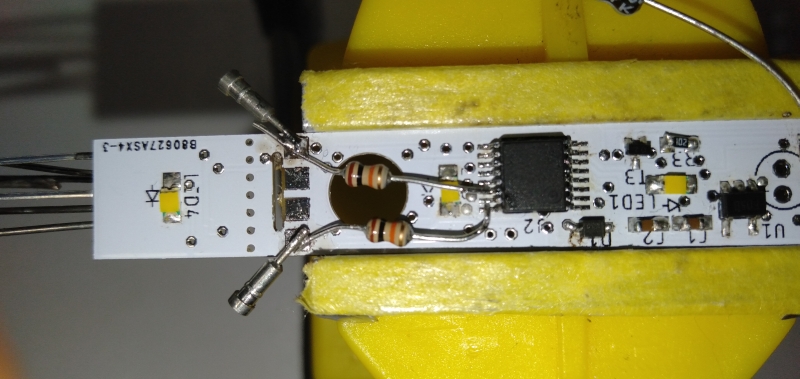
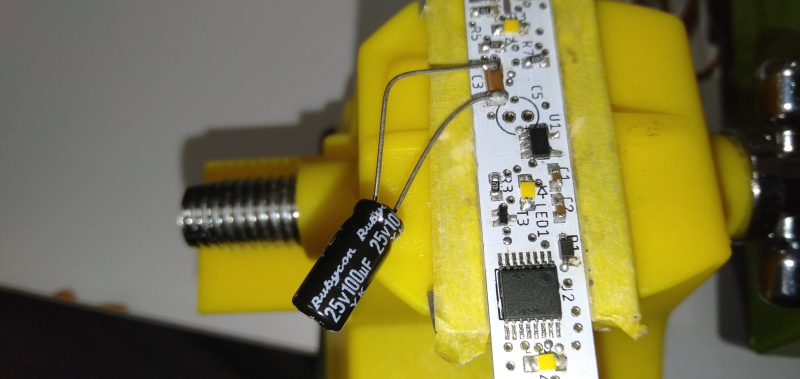
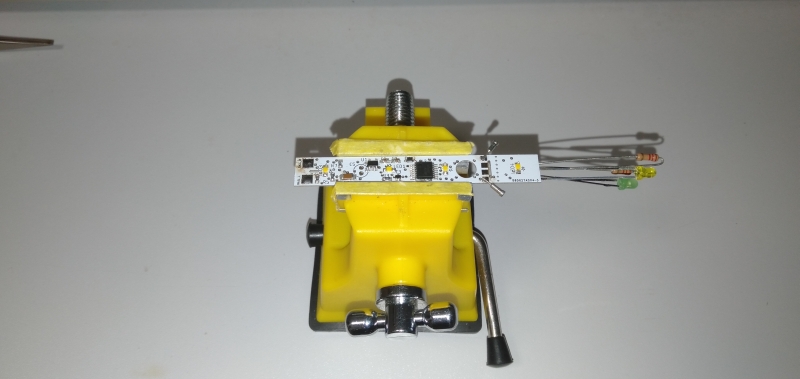
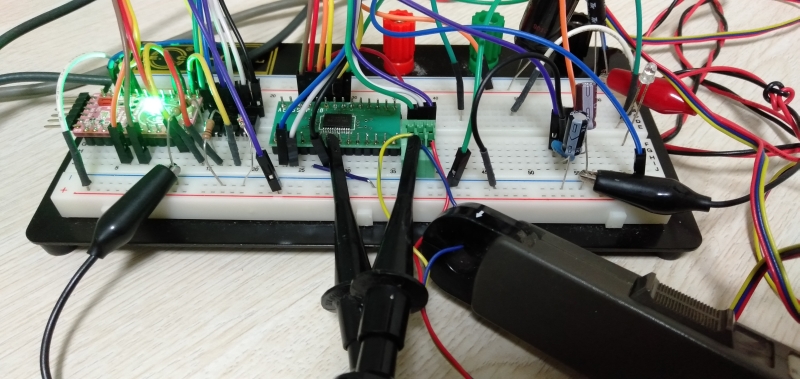
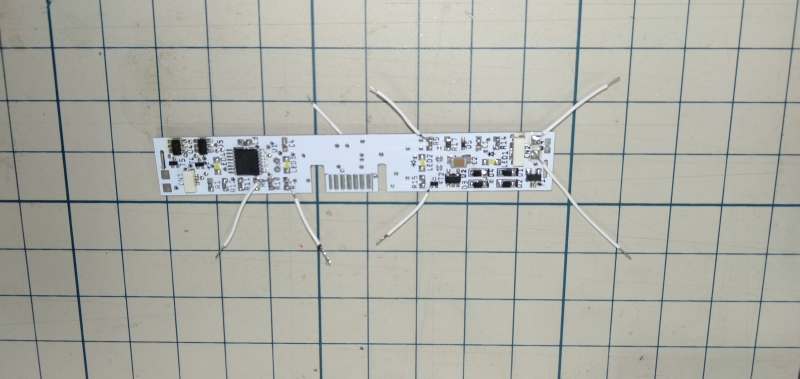 今回作った基板は小田急HiSE/LSE用向けなので非常に小さく、測定用のPADが設置出来なかったので配線を生やすことにします。
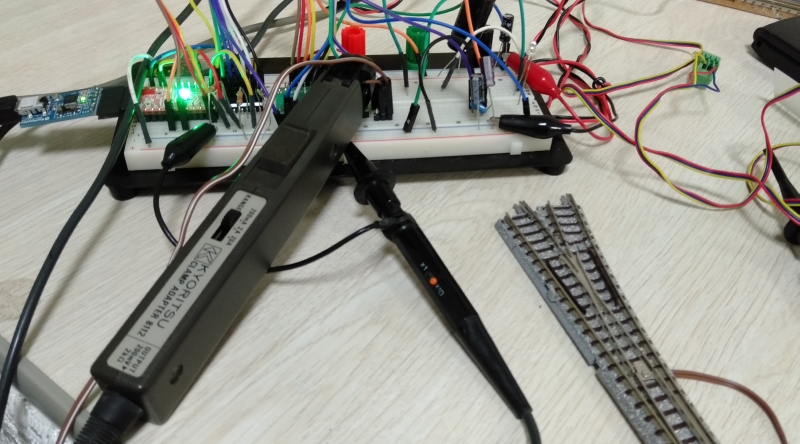
今回作った基板は小田急HiSE/LSE用向けなので非常に小さく、測定用のPADが設置出来なかったので配線を生やすことにします。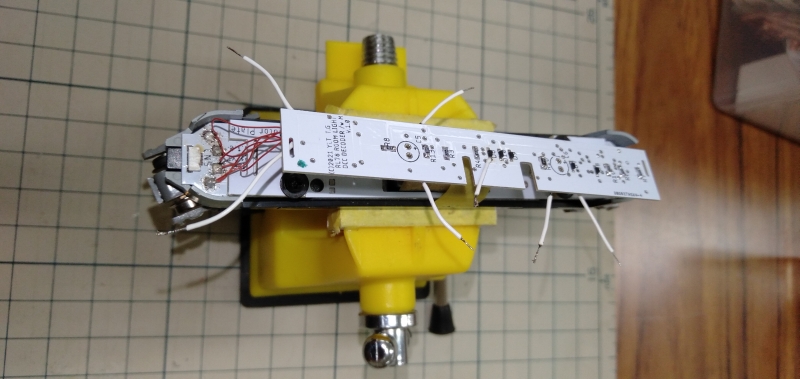 この格好だと車両には入れられなくなるので、ハンドバイスでモータ車の下回りを押さえて測定します。
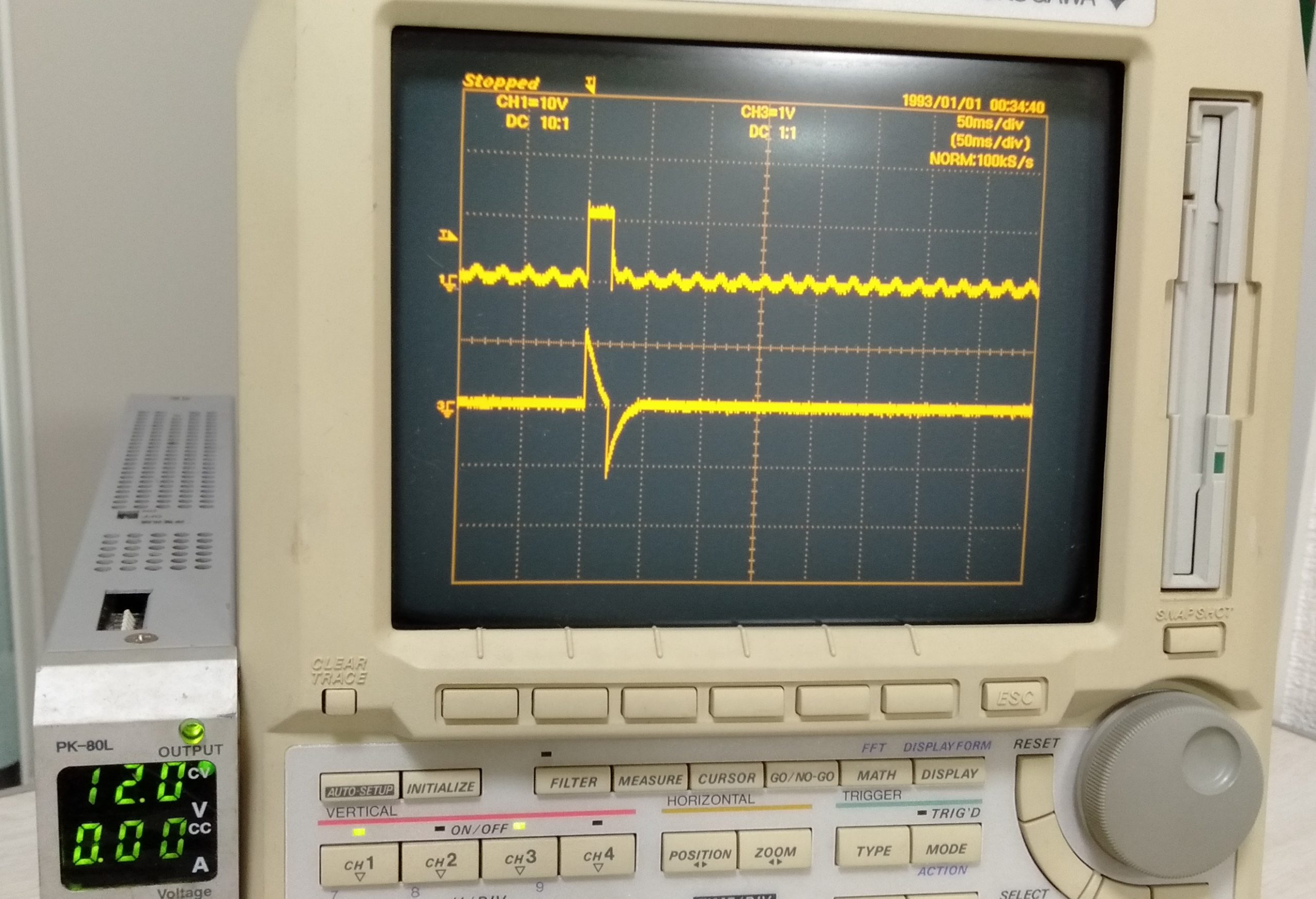
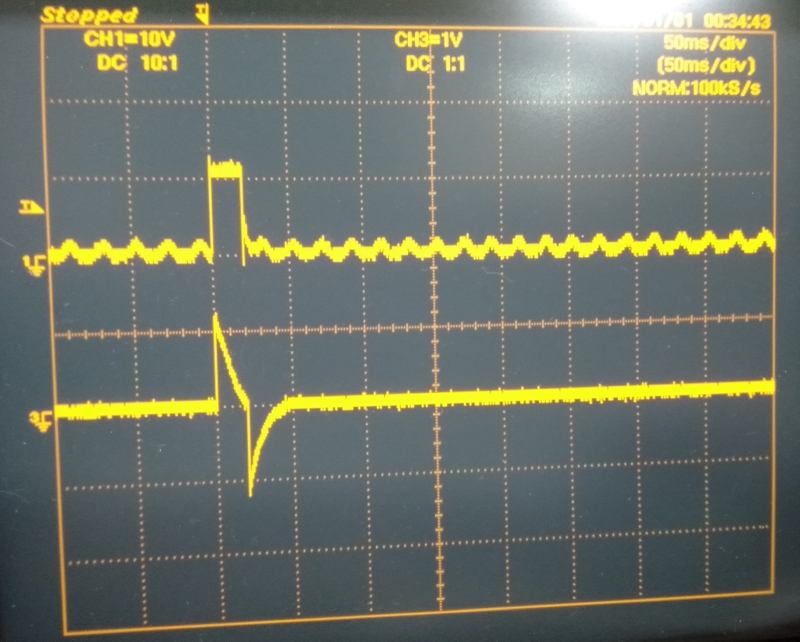
この格好だと車両には入れられなくなるので、ハンドバイスでモータ車の下回りを押さえて測定します。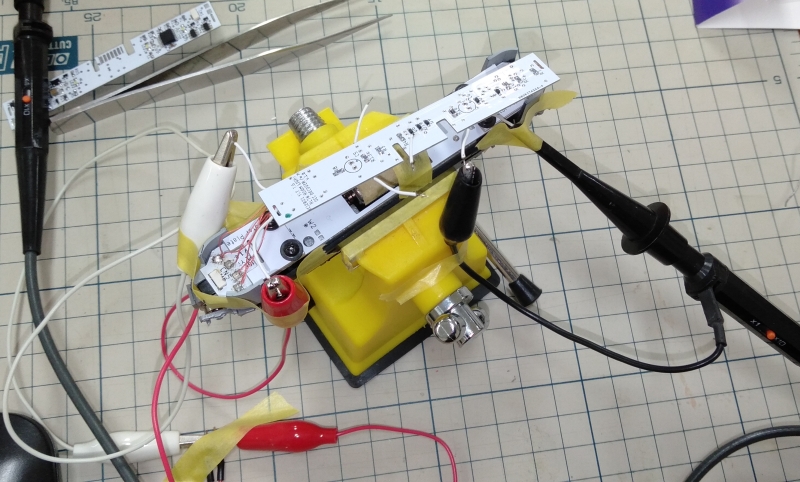 プローブを接続して電源を入れて回してみます。
プローブを接続して電源を入れて回してみます。