




ヨシノローテック技報 Vol.11 RL78マイコン工作
本誌は、システム開発サークル「ヨシノローテック」の工作活動を纏めた技術情報誌(Vol.11)です。
今号ではレトロPCの一種であるSHARPポケットコンピュータ(ポケコン)の拡張と修繕について
そして、鉄道模型用DCCのコントローラ開発について解説をしています。
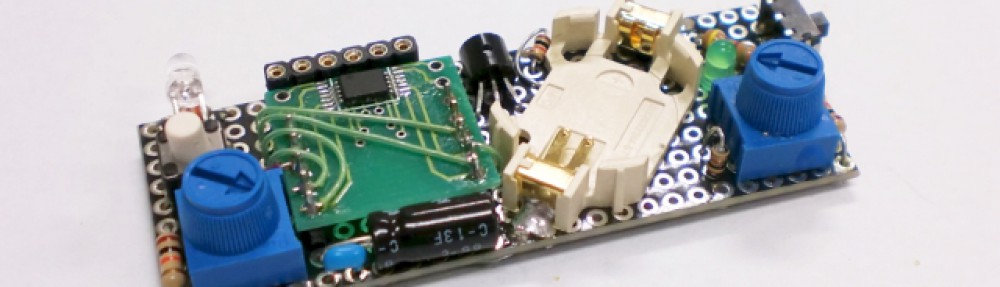
ポケットコンピュータ PC-E200/PC-G8xxに対し、超低消費電力でクロック供給ができるクロックジェネレータをRL78/G11を用いて実現。PCとの接続を行うUSBシリアル変換も内蔵し、今の時代に合った機能拡張を行いました。
また、同じくE650系ポケコンのビネガーシンドローム修繕なども行っています。
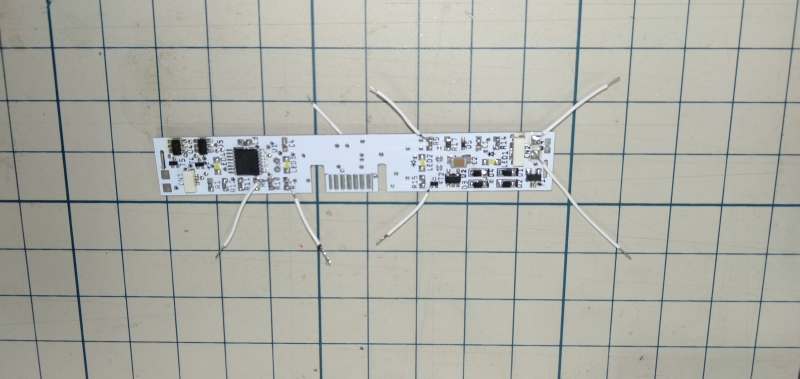
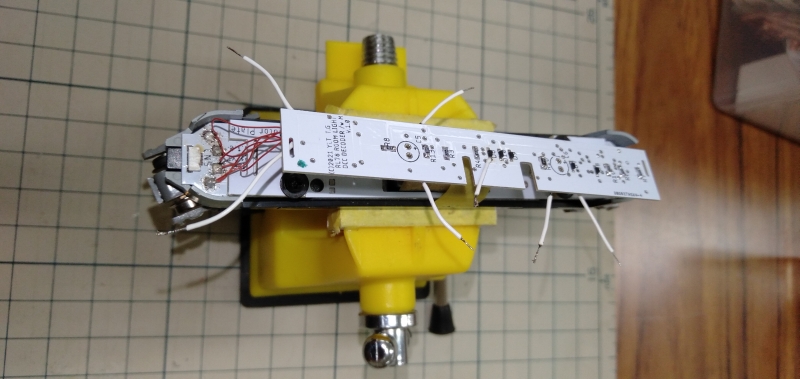
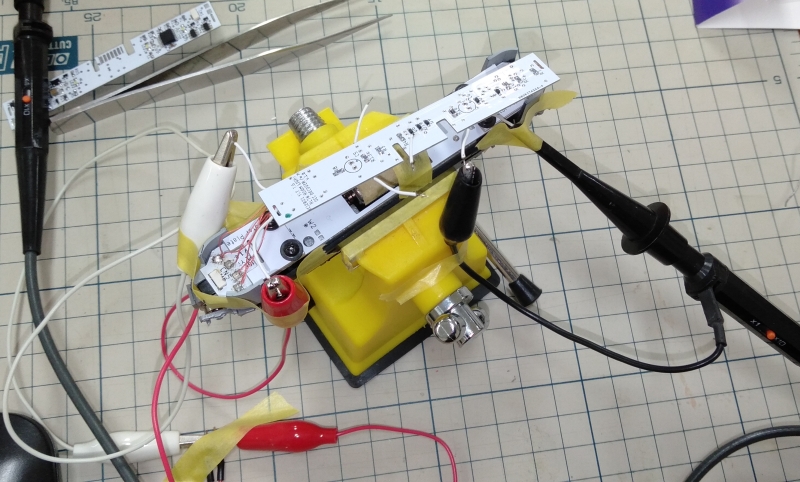
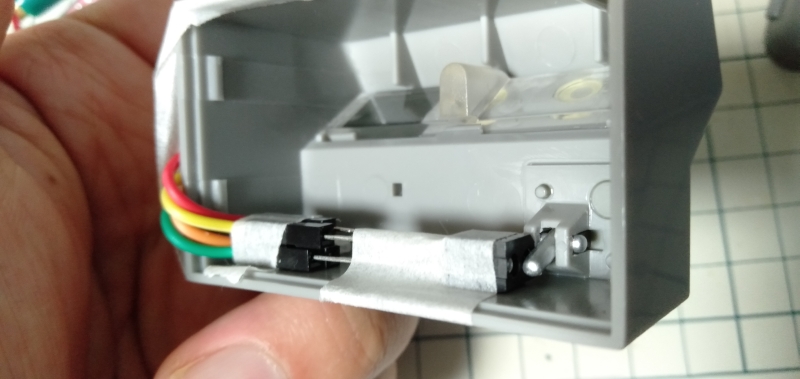
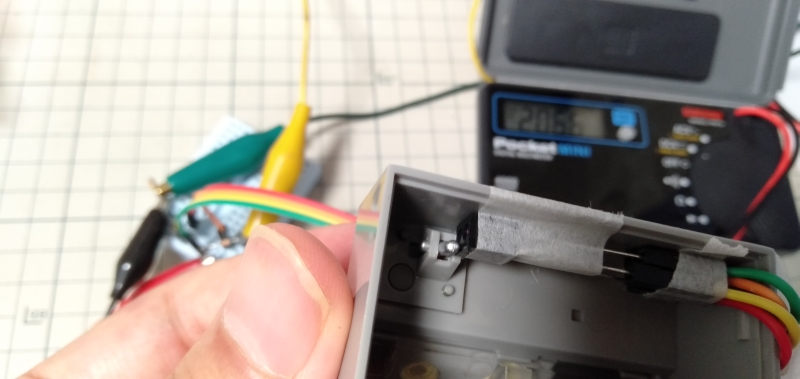
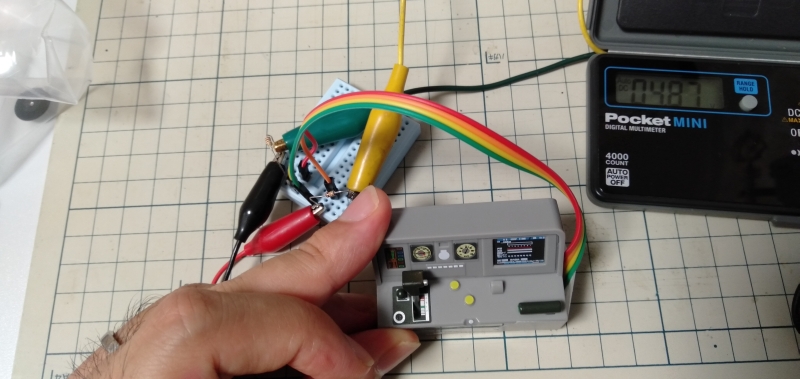
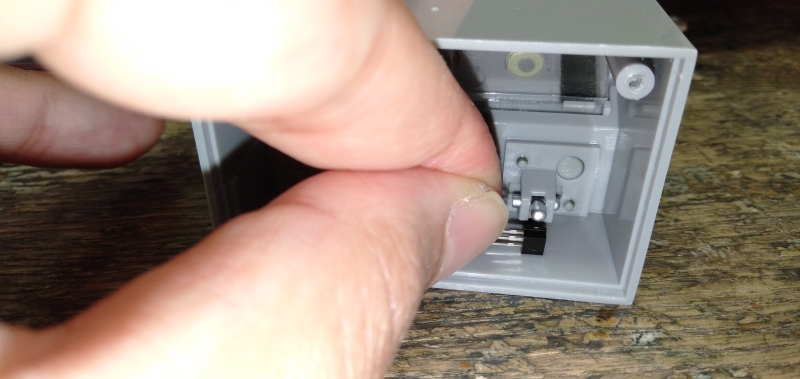
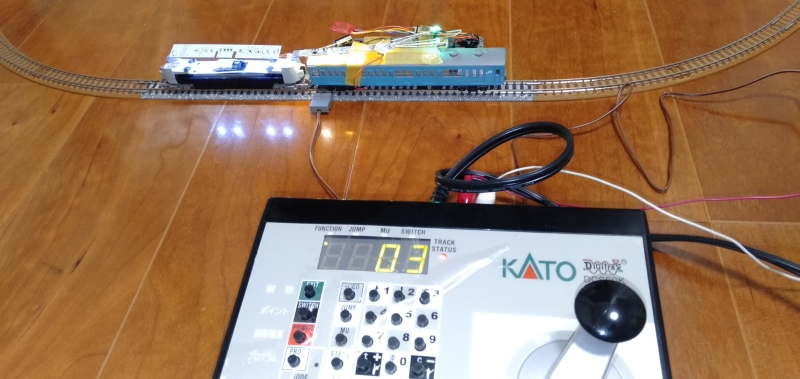
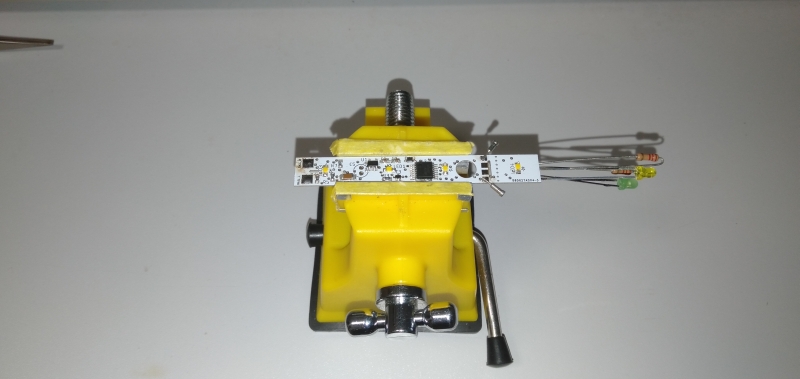
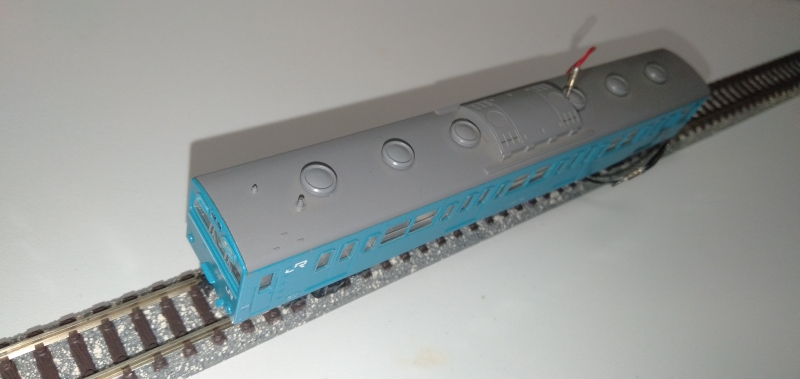
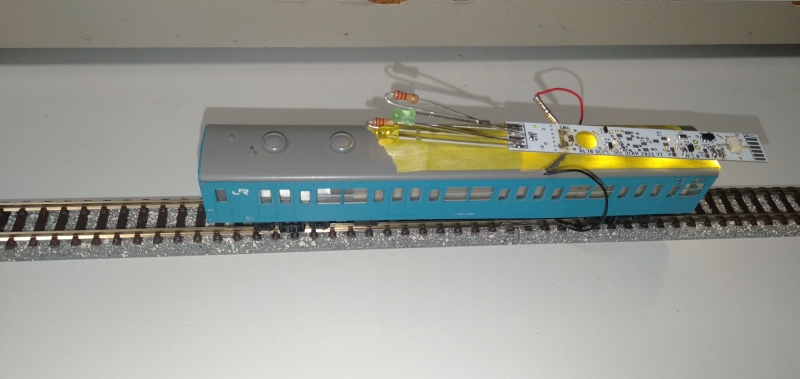
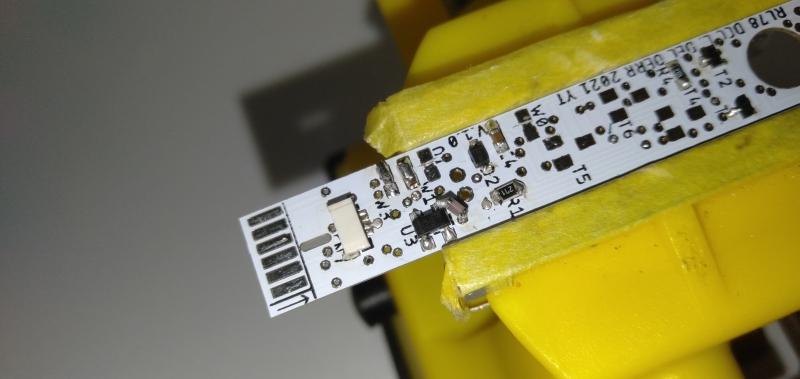
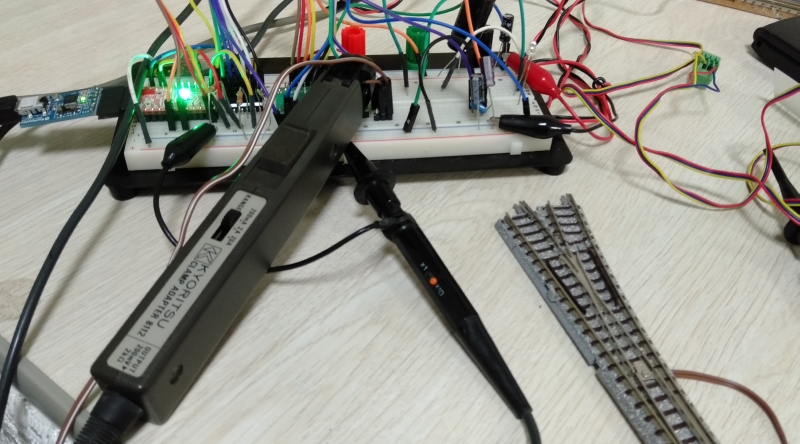
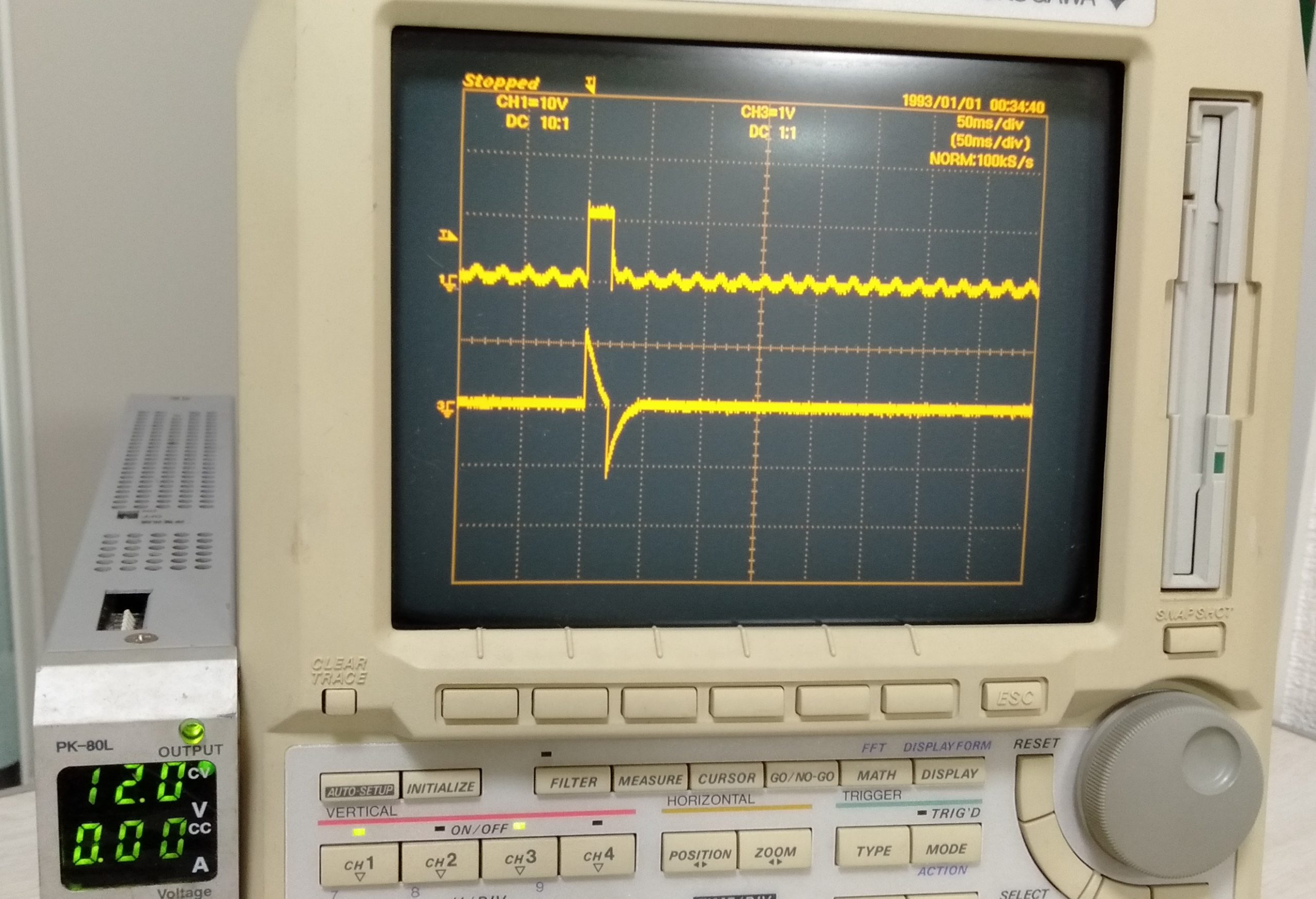
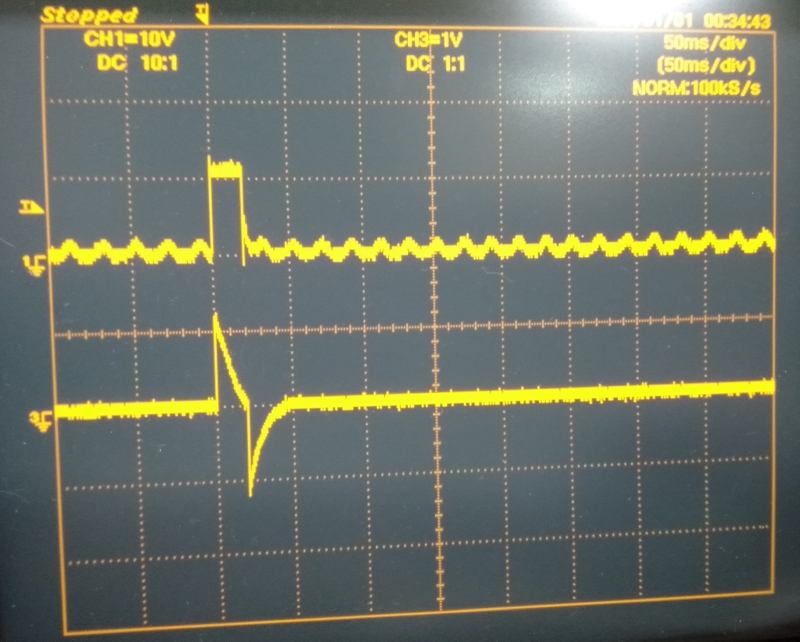
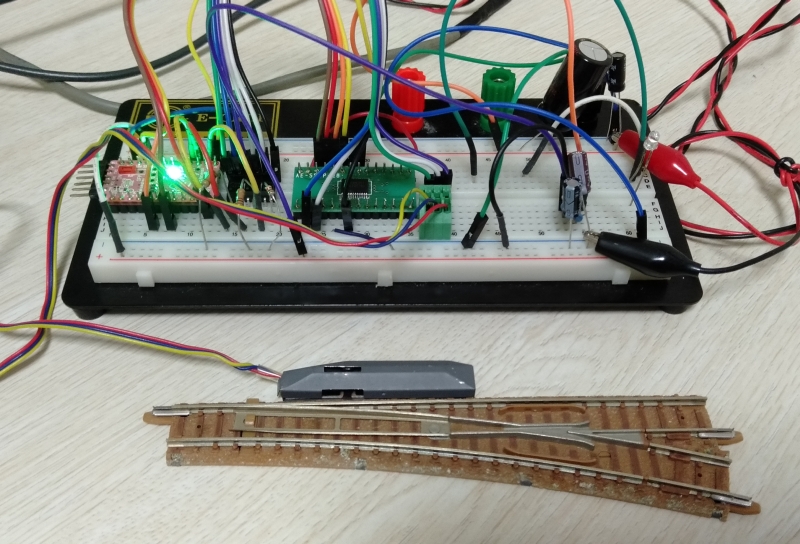
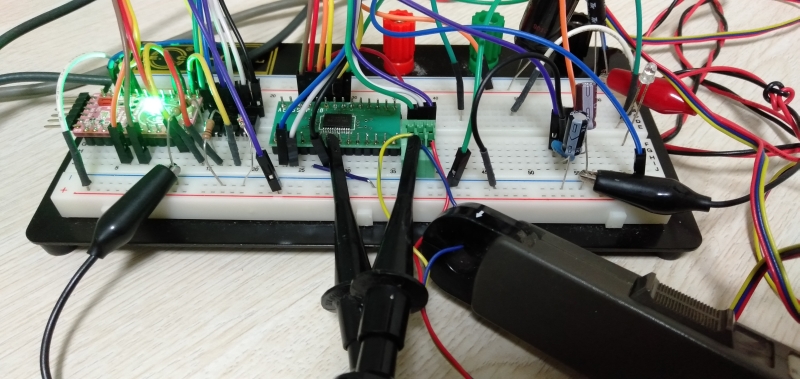
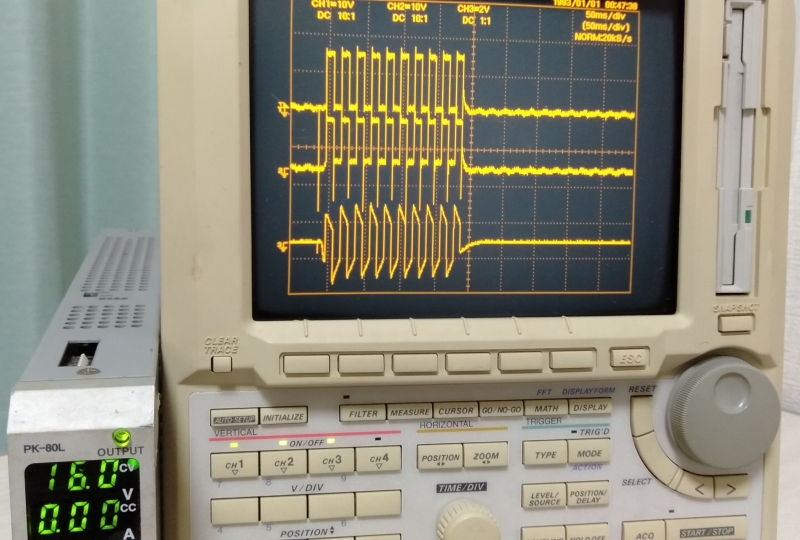
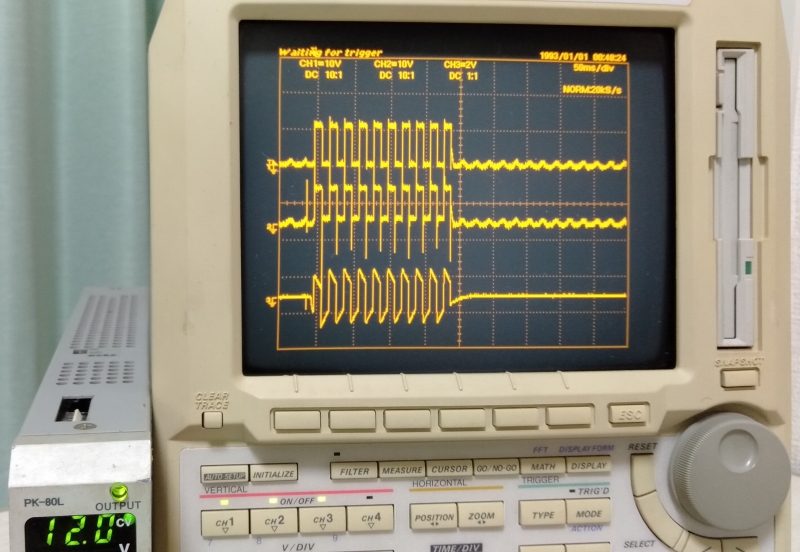
鉄道模型DCCは今号ではじめてコントローラ側を開発。別冊 Vol.2で開発した超小型コントローラのプログラムを書き換えてDCC対応を行いました。
主なコンテンツ
COVER STORY SHARP PC-E200/G8xx RL78を使った超低消費クロックジェネレータ
Special Topic1 SHARP PC-E650 ビネガ修理と定番メモリ増設
Special Topic2 鉄道模型用DCCを作るRL78超小型DCCコントローラ試作
発行:
2024年08月12日 第一版発行
2024年08月12日 第二版発行
2024年08月15日 第三版発行
2024年08月23日 第四版(KDP版)発行
ページ数:A5相当 52ページ
初頒布:コミックマーケットC104
Amazon Kindleで電子書籍版ダウンロード頒布中!
BOOTHで本頒布中!